
= = = = =
Setting
aside military trials (such as the US Navy, which lowered an undersea
TV camera to check on A-bomb blast damage to shipwrecks near Bikini
Atoll, and the British Navy, which used another to look for a sunken
submarine), credit for the first civilian ROV probably goes to
Dimitri Rebikoff of France. Frustrated by the fact that some
Mediterranean wrecks were too deep for divers to investigate, he
installed a camera in a pressure-resistant housing, added a
water-corrected lens, and mounted it on a tether-controlled vehicle
that he dubbed Poodle.
For extra treasure-finding skills, he
added a magnetometer and sonar set. (ROV experts credit Poodle
as the world's ROV, albeit an unarmed one. Having recently built a
diver-driven, one-man underwater scooter called Pegasus for
use by the Submarine Alpine Club of Cannes, France, Rebikoff had a
head start in building Poodle's controls and power train.) On
its first use in 1954, Poodle sent up video of two previously
unexplored Phoenician wrecks, one 700 feet down.
U.S.
Navy labs and Navy contractors built other camera-carrying ROVs, one
of which was Snoopy, notable for its reliance on direct
hydraulic drive, transferred from tender to vehicle through a long
tether-hose (today's ROVs all rely on electrical power, as did the
successor, Electric Snoopy).
The
first ROV to hit the water with manipulator arms emerged from a US
Navy laboratory in Pasadena, California: Cable-Controlled
Underwater Recovery Vehicle, or CURV.
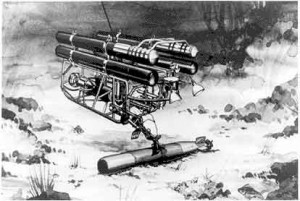
Originally tasked with
bringing back torpedoes that failed to rise to the surface after test
shots, CURV-I made international news in 1966 off Palomares,
Spain, where an H-bomb had plummeted into the Mediterranean Sea after
a bomber collision. The bomb was resting precariously on the lip of a
steep slope in a skein of parachute shrouds, which for a few
terrifying moments had tangled with the manned submersible Alvin
when that craft had tried to attach lifting shackles. Though at 2,850
feet the bomb lay well below CURV's rated depth, CURV reached the spot without imploding and finished the rigging job. Seven years
later, successor CURV III helped rescue the two-man crew of a
submersible stuck on the sea floor off the Irish coast.
The
Navy's Remote Unmanned Work System, fielded after CURV, was directed
at search and recovery work.

Challenges overcome in its development
pointed the way to today's work-class ROVs. “The Idea was to go to
20,000 feet with all the tools you needed to recover a black box,”
said Wernli. This would give access to the great majority of objects
on the ocean floor, since abyssal trenches are rare. The great depth
could have posed a serious problem in cable handling: If connected
directly to a boat on the surface via a single, thick cable more than
four miles long, the ROV would have been at the mercy of any deep
currents pulling at the line.
The solution was to use two cables: a
strong umbilical line reinforced with Kevlar fiber that plummets
straight down from the tender to a base station (called the Primary
Cable Termination), hanging above the sea floor; and a lightweight
and neutrally buoyant tether that's paid out horizontally as the ROV
ventures off to work nearby.
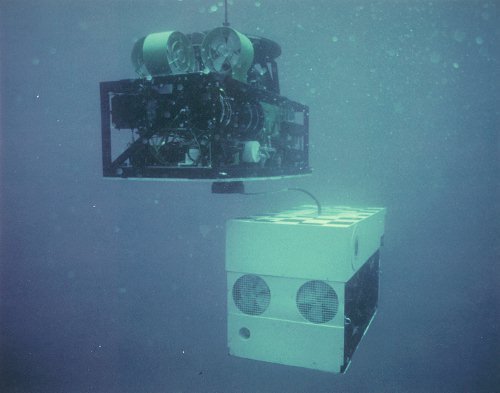
This arrangement has been very successful, because it keeps cables from
dragging along the sea floors, where the slightest turbulence will stir
up a cloud of talcum-fine silt that blocks visibility for hours.
Work
class ROVs use the same arrangement today, and it's what I saw when shadowing an Oceaneering crew on a drillship in the Gulf of Mexico. Today, the umbilical
terminates at a strong metal cage that serves as a garage for the ROV
when not in use.
The
North Sea turned the tide in favor of ROVs. With exploratory wells having
proven large reserves of oil and gas by 1970, and with oil prices
high after the first oil embargo, production began in 1975. The
conditions – undersea wellheads far from shore, and frequent storms
– were so novel that by 1980, development and installation costs
outran American expenses for the Apollo moonshots. Reserves estimated
at 70 billion barrels kept them going.
The
early years saw dozens of manned submersibles and hundreds of divers
at work, with ROVs at the margin, little more than a curiosity, of
doubtful reliability. Typical was the “flying eyeball” model,
which kept its camera trained on a diver to monitor his safety. But
by 1980, as abilities expanded and reliability improved, ROV fleets
surged.
Although
the North Sea fields are shallower than waters off West Africa,
Brazil, and the Gulf of Mexico, it was a proving ground for critical
advances: connectors that didn't short out in seawater, acoustic
beacons for precise navigation around a sunken structure, robust
manipulators, and high-quality video. Some of the most important
developments at this time had less to do with ROV hardware and more
to do with wellhead hardware.
“That
was the big turning point,” said Wernli. “When [oilfield
engineers] accepted they had to go deep, they started designing the
equipment for that: how the subsea equipment would be operated, how
valves would be turned. The key is that whenever would be needing an
ROV there had to be standard docking so it could plug something in or
manipulate something. In other words, they got the tooling in place.”
As an example, if a valve needs turning, it's better to provide
handles designed specifically for powerful, rotating claws than to
expect the ROV to wield a crescent wrench.
On the
Deepwater Horizon emergency-response spillcam sites, viewers could see ROV
claws wielding shears, circular saws, and diamond wire cutters. ROVs
can also carry drills, abrasive wheels, and jets to cut steel with
high pressure water and abrasive powder. Such tools will be handy
for deepwater decommissioning work, that costly day at the end of a
well's useful life when oil companies are obligated by federal
regulations to cut away old pipes, valves, and other sea-bottom
steelwork for hoisting to the surface. The idea is that nothing will
be left above the mudline, except those structures approved to serve as
artificial reefs.
Decades
from now such work might be turned over to AUVs, or autonomous
underwater vehicles. AUVs are now restricted to going off on
relatively simple missions, and must find their way back or surface
to open up a temporary link via satellite. An AUV's job might include
seawater sampling, surveys of the ocean floor preparatory to
pipelaying, or minehunting for the Navy.
If given the ability to
recharge along the way, AUVs can work for many weeks before
returning. Oil companies have great expectations that, with time, AUVs
can be promoted from surveys to detailed inspection of underwater equipment
such as checking valves for proper function, and then move on to
routine maintenance jobs. This will allow the more elaborate
ROVs to focus on the complicated jobs, such as “workovers” of
aging wells, and replacement of corroded parts and leaking packers.
While
deepwater technology is often compared to space shots, the most
intriguing development, to me, is how experience from the oilfields
suggests that humans can't compete with robots when doing
high-stakes work in dangerous conditions, when figured on a business
basis. Yes, today's underwater "robots" are really remote-control actuators, depending on humans to control the details
of each job at a safe distance, via levers and knobs.
But artificial
intelligence is advancing on a fast track, and with each passing year
robots will be given more authority to exercise judgment, based on how they interpret instrument readings and video
images.
From what I hear, some of the most advanced autonomous underwater vehicles (AUVs) today are devoted to minehunting. Their job is to seek out sleeper mines on the seafloor, an anti-ship tactic quite likely to be used in the next major conflict.
No comments:
Post a Comment