
It's a good example of real-world decision making, where there may be no good choices, only less-bad ones.
What's a Google self-driving car programmed to do in such a situation? While researching the topic of autonomous vehicles for my article on spacecraft and other self-driving systems, and in followup reading, I didn't see an answer to this in various articles about Google cars. (Diagram from The Economist):
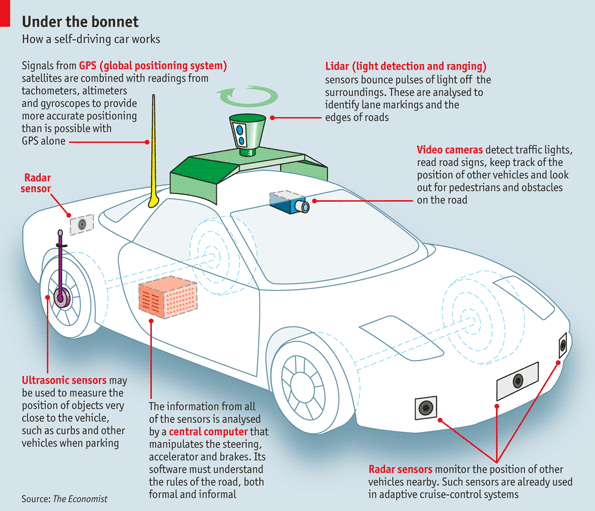
I'm not as good as a Google car's ever-spinning LIDAR turret at monitoring all the cars around me, but I do keep my mirrors swung out so I can stay aware of where the cars are. The unpleasant choices I had, in my Google-less car:
- Swerve into the left lane: No, there's a car in the way.
- Swerve into the right lane: No, a car there too.
- Hit the brakes and come to a tire-smoking stop on the freeway: Given the lack of warning, that posed a significant risk of being rear-ended. I'd do that for a pedestrian in the road, but not a ladder.
- Drive right over the ladder: I could do that, but at the risk of tearing out something in the front end, flipping the ladder into the air, and losing control myself.
- If I slowed to half speed I could let the car on my left pass, so I could get behind it, but there wouldn't be enough time to get myself fully in the left lane. But that would reduce the impact, since I could drive over just one end of the ladder. I could see that one end was mostly flattened already, by a previous impact.
So this question to the Google engineers: in the dozen or so Google cars now on the road each day, what's your algorithm for handling dangerous obstacles in the road, that are not visible to the LIDAR because of trucks ahead?
And don't say "we'll just hand it back to the guy in the driver's seat, who'll have a half-minute to take over." That's okay for some problems like bad weather on the horizon, or road construction ahead, where twenty seconds is enough for an inattentive driver to come up to awareness, but not for a dangerous object just a few car-lengths ahead.
I come across a short-span crisis like this every year or two, and each needs an immediate decision that doesn't end in a crash. Novice drivers may not realize how very easy it is to lose control at highway speeds; it can happen just by tapping another car's bumper and then over-controlling, or by swerving too energetically for the speed.
And the results can be instantly disastrous: One minute you're zipping along at the speed limit, safe and sound; but lose control and suddenly, your car is rolling over and over and throwing things out the windows, including any passengers not belted in.
I understand that in the coming years, car-to-car communication might reduce the sudden-obstacle problem because cars will communicate about such things via a rolling WiFi -- that'll be a big help -- but in the meantime, what's the plan?
No comments:
Post a Comment