(The following is adapted from my article on ROV history for Invention & Technology Magazine).
= = = =
The emergency response to the April 2010 blowout over the Macondo well was a boom time for publicity about deepwater technology. At first, the camera feeds perplexed millions. Why hadn't they heard
about any of this stuff, pre-explosion? The short answer is that ROVs spend most of their time working for the deepwater drilling industry, and that's a field that prefers a low profile.
I first spent time with ROVs and their wranglers fourteen years ago, on a deepwater-drilling ship I was visiting for a feature article in Smithsonian.
Until
the Macondo blowout, deepwater ROVs were over the horizon and
out of mind. They resurfaced as supporting actors during James Cameron's Deepsea Challenger record-breaking stunt two years ago, and now ROVs are back in the news for a little while, assuming MH370 wreckage is found (... and I'm predicting it will be, in the general vicinity of 97E / 30S).
“It's like there are whole underwater
cities down there, the installations are so big and complicated,”
said Robert Wernli, a retired ROV builder for the Navy, about subsea
oil developments. “And it's all installed remotely.”
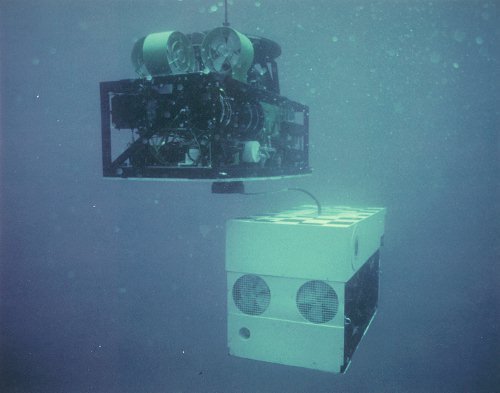
No human eye can look down on the
entire landscape we've been busy building down in the dark, but at
least we know that these boxy underwater robots are the A-Team, in
fact the the only team, when things need fixing in deep, dark places (Offshore Angola photo, BP):
But ROVs have worked such jobs before.
ROVs plucked an H-bomb off a ledge in the Atlantic in 1966, snipped a
Russian submersible loose from a steel antenna, patched up
hurricane-ravaged pipelines, and (on numerous occasions) have helped
lasso giant hunks of drilling equipment out of deep silt following
mishaps above. In deepwater operations around the world, from Brazil
to Asia, nothing can touch ROVs for doing yeoman's work at negligible
risk to humanity: not divers in heated suits breathing exotic gas
mixtures nor people riding around in little submersibles with claws
and cameras.
While divers still offer a unique ability to wiggle into
tight spaces and fix a problem by feel alone, they can't survive
in deepwater fields. Even high-tech “atmospheric
diving suits” -- hard-shelled suits with mandible arms – can't
bring a diver deeper than 2,300 feet and that's at the cost of much
human agility.
Common oilpatch wisdom once regarded
ROVs to be economic only for jobs deeper than a thousand feet; divers
would do the rest. Now, said Drew Michel, ROV consultant and adviser
to the Marine Technology Society, the oil industry is hiring ROVs to
do work in waters as shallow as 150 feet. This was once the exclusive
domain of commercial divers. “We know what they can do now, and how
to use them.”
Because water squelches conventional radio waves, the
“remotely operated” aspect depends on a tether that bundles electrical
and communication lines. While the operator can be floating nearby
inside a tiny manned submersible linked by tether, the operator usually works
from a control room aboard the specialized subsea-intervention vessel
that hosts the ROV, on the surface. A typical ROV has two crews working in the background, each with
three crewmen working 12-hour shifts.
Here's how an oilfield ROV's long night begins:
up top, an ROV has been given the order to go over the side on a
specific mission, say to replace anti-corrosion anodes at a pumping
station in the Mississippi Canyon. Because each trip down and up
wastes valuable time, mechanics make sure that all tools and new
anodes it will need are sent along. Mechanics also ensure
that the buoyancy of the ROV is right for the payload on board the
6,000-foot depth of the worksite.
With the ROV clamped securely inside a
transport cage, safe from being jounced around, the rig rolls down a
vertical track bolted to the ship. Along with its thick umbilical
line, it vanishes under the waves in a cloud of bubbles. Having
reached the end of the track and well below the worst turbulence, the
cage unhitches from its track and begins the long plunge, hanging at
the end of a heavy umbilical cable that provides all services of a
tether, but is reinforced to bear the weight of ROV and cage. The
winch operator stops the cage before it touches down at the bottom;
this avoids stirring up silt each time the ROV returns to fetch
another tool or spare part. To save valuable time, every aspect of
the job has been planned and run on a simulator. Using the high
definition TV cameras, the operator moves in and orders the ROV to
get a grip on the nearest metal structure with one claw, and starts
yanking old anodes with the other.
ROV movements need a high level of
three-dimensional coordination during a complicated response such as wreck recovery or troubleshooting at a wellhead, where a half dozen can be on the job at once. In
addition to all other work, someone must track their
movements ensure that the ROVs don't get their tethers in a knot. (Upon
command, or if contact is lost for an extended period, ROVs can cut
their tethers and slowly rise to the surface to await rescue.)
In the pre-ROV era, any work at depth
was done by divers wearing heavy suits of rubber, canvas and metal.
They clomped along the seafloor in weighted boots, and even heavier
helmets, supplied with air pumped through rubber hoses by tenders.
Typical work, done at harbor depth, was bolting together underwater
pipelines, repairing ships, and salvaging useful goods from sunken
ships that could not be patched and raised.
Advances in SCUBA tanks and regulators,
decompression equipment, and specialized deep-diving mixtures of
hydrogen, helium and oxygen later made it possible to go much deeper.
Divers with the French company COMEX set a world record of 530 meters in one
trial, but at enormous risk. Actual work was barely possible at half that depth,
for brief periods followed by many days of decompression. (Sorry,
Abyss movie fans: no divers ever went down to the sea with liquid-filled
lungs -- there were experiments, but not with divers.)
But, says Drew Michel, such
ultra-deep diving achievements lack practical meaning, given the risks and expense: “No
oil company in their right mind would depend on such a dive,” he told me. Costs
are fantastically high, the work cannot go continuously, and a single
injury shuts down the entire work flow.
At first the limits of deep diving
seemed to point toward the manned submersible, a mini-submarine out
of which a crew would wield tools. In the mid-1960s high-tech
corporations practically swooned over such machines, because (surely) they would open
up the deeps to mineral exploration. And this was a time where nearly everybody worried about strategic minerals.
The mania over manganese
nodules and other bounty touched even companies with no experience
in the subject. American corporations investing in undersea tech
included Westinghouse, Northrop Grumman, North American Rockwell,
Lockheed, General Dynamics, Hughes Tool, and Litton Industries.
“Every major defense contractor went into it,” said Robert
Wernli, ”but after they found the certification requirements were
so expensive to meet, most of the machines built went on blocks for
display.” Even General Mills, maker of cake mixes and cereals, got
into the act by applying for, and winning, a submersible government contract.
“Most of the companies entered
because they saw Howard Hughes getting involved, but he was after a
Russian submarine instead,” said Drew Michel, referring to the
CIA-backed Hughes Glomar Explorer, aka Project Azorian (Photo, US Government):
Among the few craft launched were
Alvin, started by General Mills, but finished by Litton (Photo, General Mills) ...
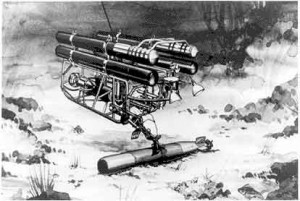
... and Beaver
Mark IV, built by North American Rockwell, also known as Roughneck (Photo, omegamuseum.com):
The builders equipped Roughneck with manipulators to serve as an
undersea workboat that could install subsea oil and gas equipment in
half-mile deep waters. Assuming that oilfield equipment would always
need the human touch, most concepts for deepwater oilfields circa
1973, such as Exxon's, expected that fleets of diving bells and
submersibles would shuttle workers from the surface down to steel
capsules encapsulating wellheads and pumps. Workers would climb from
submersible to capsule, carry out their jobs in “shirtsleeve” if
claustrophobic conditions, and return to the surface.
ROVs would have
played a minor part in such a human-centered plan (which is portrayed in Abyss, by the way).
While some experiments along this line
were carried out, an entire infrastructure based on thousands of
“subsea work enclosure” capsules scattered across the seafloor
was neither safe nor practical. Until this was discovered (see Part 2), the unmanned subs now known as ROVs
were merely a curiosity, and of interest only to the military, treasure
hunters, and scientists.









{kind=link}